|
Datalogger:
IMU6410 IMU6420 IMU8420
GPS/ZIGBEE: GP1 ZB1 USB10Z
IMU6410
The IMU6410 was
SOC Robotics first integrated 10DOF IMU Data Logger that initially didn’t
support logging to uSD, ANT/ZigBee wireless communication or optional high
performance MS5611 barometer. The SDANT10 daughter card added these missing
features.
IMU6420
With the
introduction of the IMU6420 Lithium Polymer battery support with on board
charger was added and the SDANT10 features were built onto a single board
eliminating the need for the daughter card creating a more compact and
reliable platform. The IMU6420 also changed a few expansion port pins to
allow hardware PWM support enabling use of this board to control a UAV,
gliding craft or similar devices. The external serial flash chip was also
dropped.
IMU8420
The IMU8420 was a
major upgrade with a new high performance AVR32 32 bit processor allowing a
sophisticated Extended Kalman Filter to run in real time on the platform due
to the processors hardware floating point unit. The EKF was a collaborative
development between SOC Robotics and researchers at Simon Fraser
University. The AVR32 also brought significantly faster logging performance
while the on chip AST increased real time clock precision with usec
resolution so the time stamp is now output to the nearest 100useconds (this
can be reduced).

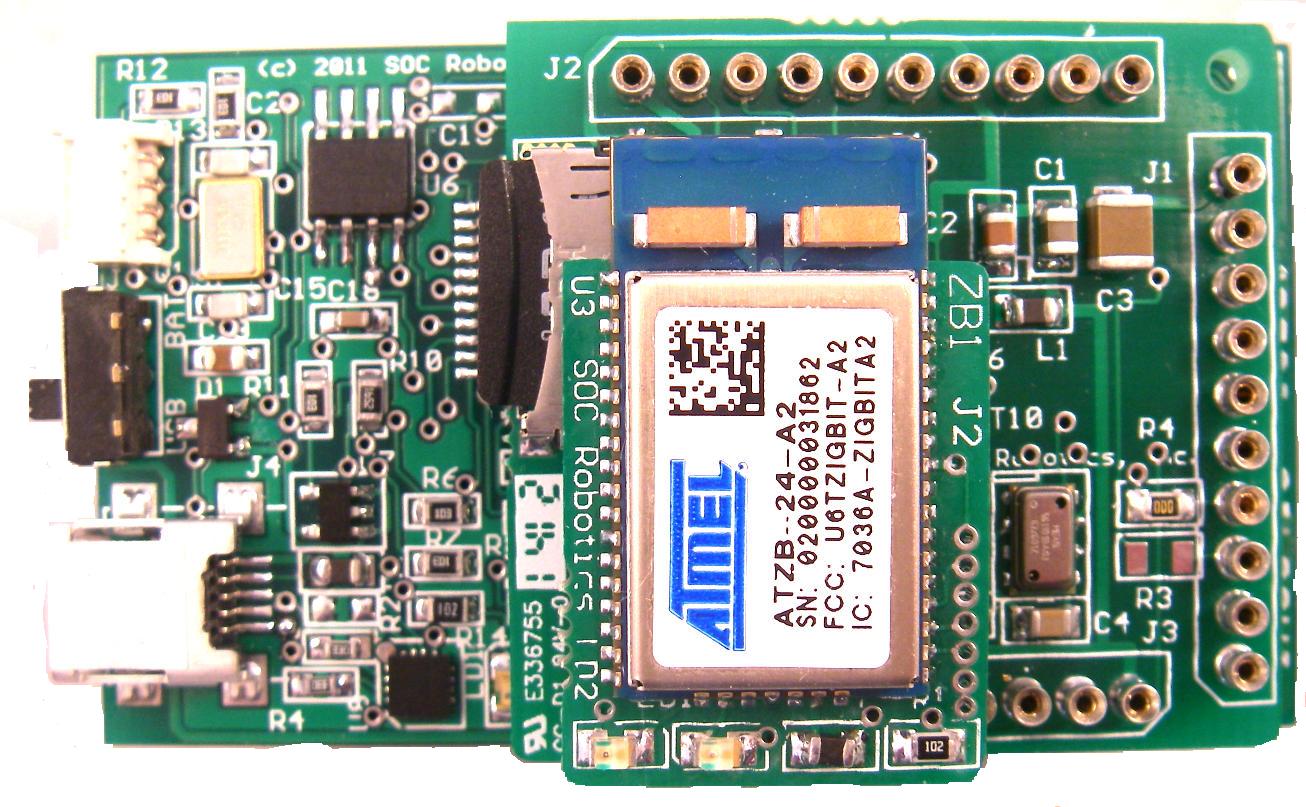
GP1/ZB1/USB10Z
The GP1 is a
GPS daughtercard for the IMU6420 and IMU8420. The ZB1 is a Zigbee
module that communicates with a USB10Z desktop Zigbee module.



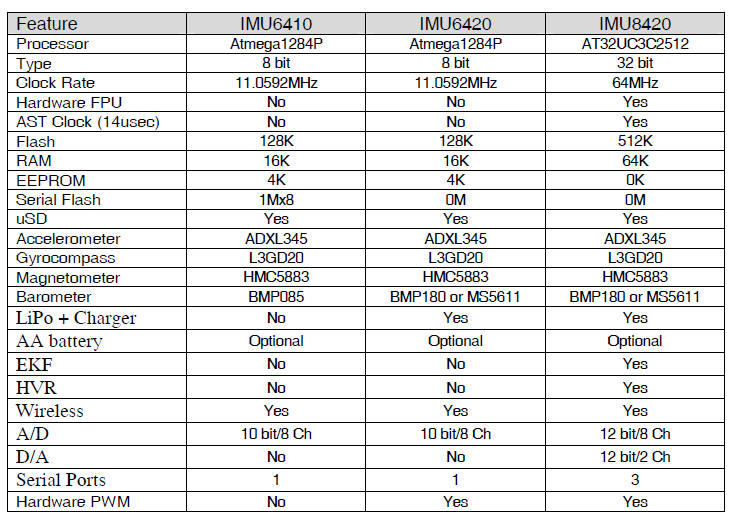
IMU Comparison
IMU6410 ATmega1284P 11.0592MHz 8 bit CPU
IMU6420
ATtmega1284P 11.0592MHz 8 bit CPU
IMU8420
AT32UC3C2512 64MHz 32 bit CPU
The IMU8420
processor has a number of important features that will be in future IMU Data
Logger software releases. The processor has a DMA engine that significantly
speeds up logging to uSD as the current software does not use DMA. The
large on chip SRAM will allow logging of very high speed short duration
events (burst logging) such as measuring acceleration at 3000Hz for short
time periods. Combining the on chip event subsystem with the 1msample/sec
12 bit A/D allows the IMU to log ultra fast analog events.
With the
introduction of Version 1.00 IMU Data Logger software ZigBee wireless
support is fully integrated allowing wireless control of the data logger
along with additional logging features on the IMU8420. The EKF cycles in
1.84msec while sensor acquisition takes 900usec giving a real time maximum
cycle rate of just under 3msec. The EKF produces roll, pitch and yaw in
real time that can now be logged along with all the sensor data. Version
1.00 also fixed a clock error with the IMU6410 and IMU6420. See the Version
1.00 release notes for additional information on each device.
Version 1.03
introduced special support for the optional GPS module. GPS data can
now be logged as GPX format allowing drag and drop support in Google Earth.
Now that the
IMU8420 calculates roll, pitch and yaw in real time it can be used as a
motion stabilization controller with the addition of a three-axis motion
control daughter card (which is in the works) or by having it control one of
our other motion control boards like GenX or GenX32.
Additional sensor
fusion by GPS with 10DOF sensor data is under development and will be
released soon.
SOC Robotics IMU Summary:
IMU
Differences.pdf
|
